Перемикачі та датчики
стрічкопротягувального механізму відеомагнітофону
1 Перемикачі та датчики
стрічкопротягувального механізму відеомагнітофону
2
Настройка стрічкопротягувального механізму відеомагнітофону
1 Перемикачі та датчики стрічкопротягувального
механізму відеомагнітофону
На рис. 1 показаний
стрічкопротягувальний механізм (СПМ) формату VHS і розташування стрічки щодо
його основних компонентів. Стрічка має конфігурацію, схожу на букву М. Тому
заправлення стрічки формату VHS іноді називають М-заправленням.
Рисунок 1 –
Стрічкопротягувальний механізм ВМ
формату VHS і його основні компоненти (стрічка заправлена).
Відеоголовки виступають над поверхнею
барабану на 45 мкм. На верхньому циліндрі
може бути встановлено цілих вісім голівок: 2 відео головки режиму відтворення SP; 2 відео головки
режиму відтворення LP і ЕР; 2 аудіоголовки для режиму Hi-Fi Stereo; 1 головка для спец ефектів або стоп-кадру; 1
головка стирання (у деяких моделях дві).
Незалежно від того, скільки
голівок у ВМ, усі вони знаходяться на одному верхньому обертовому циліндрі
вузла відеобарабана. Як показано на рис. 2, з кожною головкою зв'язані дві
обмотки обертового трансформатора. Одна обмотка знаходиться на верхньому
обертовому циліндрі, а інша на нерухомому нижньому. Під час запису і
відтворення електромагнітний зв'язок між обмотками обертового трансформатора
здійснюється за допомогою сигналів змінного струму. Сам по собі обертовий
трансформатор не може бути замінений; його відмова вимагає заміни всього блоку
обертових головок цілком.

Рисунок 2 – Конструкція відеобарабану
Практично у всіх нових
відеомагнітофонах VHS використовується електродвигун безпосереднього привода,
що входить у вузол відеобарабана. У процесі відтворення і запису швидкість і кут повороту цього електродвигуна
ретельно контролюються електронними
схемами.
По-перше, необхідно, щоб головки
оберталися з належною швидкістю (1500 об/хв.), що відповідає 50 кадрів у
секунду. Тому схеми керування електродвигуна відеобарабана повинні знати, з
якою швидкістю він обертається, щоб гарантувати необхідні 25 обертів за
секунду.
По-друге, потрібно контролювати
кут повороту верхнього циліндра таким чином, щоб кожна відеоголовка сканувала
свої доріжки відеострічки. Обов'язково, щоб у процесі відтворення головка А
сканувала відеодоріжки, що записані головкою А. Аналогічним образом головка В
повинна точно попадати на доріжки, що сформовані головкою В. Це відбувається,
навіть якщо стрічка була записана на іншому відеомагнітофоні. З огляду на ці
дві умови, необхідні датчики, що передають інформацію про частоту обертання і
кут повороту відеобарабана електронній схеми, яка керує швидкістю
електродвигуна. Як правило використовують два датчика: один формує сигнал частотного
генератора (FG), що вказує швидкість обертання; другий сигнал імпульсного
генератора (PG), що повідомляє про кут повороту.
В одній з конструкцій відео
барабана (рис. 3) на верхньому обертовому циліндрі знаходяться два постійних
магніти, а на нижньому дві електромагнітні вимірювальні котушки. При обертанні
верхнього циліндра ці котушки утворюють імпульси, коли над ними проходять
магніти. Ці імпульси направляються на електронні схеми, що визначають швидкість
і положення відеоголовок. У багатьох сучасних відеомагнітофонах сигнали FG
(частотного генератора, що повідомляє про швидкість) і PG (імпульсного
генератора, що повідомляє про положення) виробляються не вимірювальними
котушками, а приладами на ефекті Холу.
Прилад на ефекті Холу – це напівпровідниковий елемент, що пропускає
електричний струм, коли до нього прикладається магнітне поле. Для відводу
статичного заряду використовується перемичка, яка з'єднана з заземленням на
шасі і валом електродвигуна барабана. Вона може розташовуватися у верхній,
нижній частині вузла або навіть
усередині барабана між його верхнім і нижнім циліндрами.

Рисунок 3 – Конструкція відео
барабана, де на верхньому обертовому циліндрі знаходяться два постійних магніти
Датчик касети – це перемикач з нормально
розімкнутими контактами. Коли завантажується касета, контакти цього перемикача
замикають електричне коло. При цьому посилається сигнал мікропроцесору системи
керування, і він, таким чином, «довідається», що знаходиться касета.
Датчик завантаженої касети може
розташовуватися в різних місцях. Як правило, робочий важілець перемикача
знаходиться на верхній поверхні піднавійника. У більшості конструкцій нижня
частина завантаженої касети давить на плече важеля перемикача. В інших
перемикач приводиться в дію лівою чи правою стороною касети, коли вона лягає на
піднавійник.
Датчик завантаженої касети (cassette-in)
на піднавійнику не слід плутати з
датчиком уставленої касети (cassette-insert) на вузлі завантаження
касети попереду. Датчик завантаженої касети спрацьовує при завершенні
завантаження касети, коли вона знаходиться на піднавійнику. При цьому на
передній панелі з'являється піктограма завантаженої касети.
Датчик уставленої касети
спрацьовує, коли касету повільно всувають в отвір вузла переднього
завантажника. При цьому подається сигнал системі керування, щоб вона включила
електродвигун завантаження касети, що потім переміщає касету по траєкторії, що
має форму поверненої букви L — усередину і вниз на піднавійник.
У деяких магнітофонах немає окремого датчика завантаженої касети. Замість цього
закриття одного чи обох датчиків кінця стрічки вказує системі керування на те,
що касета завантажена.
Датчик
блокування запису. Для запобігання випадкового запису поверх раніше записаного матеріалу на
касеті знаходиться язичок захисту від запису. Якщо цей язичок відсутній (виламаний),
то ВМ не може ввійти в режим запису. Коли касета завантажена, мікроперемикач
розпізнає наявність або відсутність язичка захисту від запису. Як
правило, це перемикач з нормально замкнутими контактами. Коли язичок захисту
від запису на місці, плече важеля перемикача зміщується і розмикає його
контакти. Коли язичок захисту від запису виламаний, плече важеля перемикача
знаходиться у вирізі касети, а його контакти замкнуті. Це вказує системі
керування на заборону режиму запису.
Датчики
приймальної та подавальної котушок. Призначення датчиків приймальної
та подавальної котушок – інформувати чи обертаються приймальний й подавальний
шпинделі. На більшості ВМ передбачений датчик приймальної котушки, на деяких
моделях є обидва датчики. Система керування використовує вихідні сигнали цих
датчиків для отримання інформації про те, чи правильно працює
стрічкопротягувальний механізм.
Якщо приймальний шпиндель
перестає обертатися, система керування звільняє притискний ролик, вивантажує
стрічку і виключає ВМ. Датчик руху котушки самого розповсюдженого типу
складається з інфрачервоного світлодіода і фототранзистора, що знаходяться в
ходовій частині безпосередньо під прийомним шпинделем. У нижній частині
шпинделя знаходяться світловідбивні і невідбивні смужки. При обертанні шпинделя
фототранзистор, на який попадають відбиті інфрачервоні промені, посилає
імпульси системі керування. Ще одна можлива конструкція датчика обертання –
оптичний диск кодер з прорізами чи отворами і пари інфрачервоний
світлодіод-фототранзистор.
До складу електродвигунів шпинделів із прямим приводом може входити
датчик Холу, що виробляє імпульси датчика обертання.
Датчик приймальної котушки в
більшості сучасних відеомагнітофонів використовуються для електронного лічильника
витрат стрічки, який відображається на
передній панелі.
Датчики
кінця стрічки. У
ВМ формату VHS для виявлення того, що стрічка підходить до кінця (початку)
використовується оптична система. Обидва кінці магнітної відеострічки усередині
касети з'єднані з приймальною та подавальною котушками прозорими ракордами з
довжиною шість дюймів. Коли касета
завантажена на піднавійник, стійка, на якій знаходиться джерело світла, входить
у неї через круглий отвір у нижній частині касети. Цей отвір має діаметр пів
дюйма і знаходиться посередині між бічними сторонами касети на відстані один
дюйм від передньої сторони. Світло
проходить через канали усередині касети до лівої (подавальної) і правої
(приймальної) сторони.
Невеликі отвори в правій і лівій
сторонах касети знаходяться на одній лінії з зазначеними каналами і стійкою з
джерелом світла. Коли стрічка доходить
до кінця, світло проходить через прозорий ракорд, виходить з отворів у
бічних сторонах касети і попадає на фототранзистори, закріплені на
стрічкопротягувальному механізмі з обох боків касети. На рис. 4 показано, як ВМ
формату VHS визначає кінець стрічки.
 Рисунок
4 – Визначення початку та кінця стрічки.
Рисунок
4 – Визначення початку та кінця стрічки.
Якщо фототранзистор спрацював під час відтворення, то система керування
виводить ВМ із режиму відтворення і переводить його в режим «Стоп» та
вивантажує стрічку. У деяких моделях система керування переводить відеомагнітофон
в режим прискореного перемотування назад. Аналогічним чином, коли під час
прискореного перемотування назад виявляється кінець стрічки на приймальній
котушці (тобто стрічка цілком перемотана), система керування переводить відеомагнітофон
в режим «Стоп». Ці дії запобігають різкій зупинці стрічки і вириванню ракорда з
котушок. Коли касета не завантажена, повинний
бути присутнім вихідний сигнал від обох фототранзисторів, оскільки ніщо не
заслоняє шлях світла. Якщо система керування не одержує вихідних сигналів від обох
транзисторів, вона знає, що щось трапилось з джерелом світла
або з одним з фототранзисторів, і
тому виключає ВМ.
Режимний
перемикач. Режимний
перемикач, що знаходиться усередині ходової частини, повідомляє системі
керування, що відбувається зі стрічкопротягувальним механізмом. Він сприймає
положення механічних деталей, і тому його також називають режимним датчиком. Режимний електродвигун відповідає за кілька механічних
операцій, велика частина яких відбувається в ходовій частині.
Існує безліч варіантів роботи режимного
механізму, однак його операції зовсім типові. При всіх операціях системі керування необхідно знати механічний
стан стрічкопротягувального механізму. Цим займається режимний перемикач.
Він повідомляє системі керування, що стрічка заправлена або вивантажена, щоб
можна було припинити подачу постійного струму на режимний двигун. Він також
передає інформацію про інші положення режимного механізму після заправлення
стрічки, щоб система керування знала, у якому напрямку повинний обертатися режимний
електродвигун для виконання наступних операцій і коли його варто зупинити.
Режимний перемикач повідомляє системі
керування положення кулачка і, таким чином, про те, що відбувається в
стрічкопротягувальному механізмі.
Маються режимні перемикачі двох
основних типів: механічні й оптичні. Перемикачі обох типів розташовуються в ходовій частині поруч з
кулачковим механізмом, при цьому від вузла перемикача відходить не менш
чотирьох проводів.
Розглянемо, як працює
багатопозиційний механічний режимний перемикач. Коли кулачок при обертанні
проходить через різні положення, робочий важіль переміщає движок перемикача. У
залежності від стану перемикача усередині нього замикаються різні електричні
контакти. Припустимо, що на деякому ВМ до перемикача підходить чотири проводи,
і один з них – загальний. Інші три проводи з'єднані з контактами перемикача А,
В и С. Будь-який з контактів А, В, С або усі вони можуть з'єднуватися з
загальним проводом у залежності від положення перемикача. При різних положеннях
кулачка контакти А, В та С у різних комбінаціях з'єднуються з загальним проводом
і повідомляють системі керування про положення елементів стрічкопротягувального
механізму. Наприклад:
- жоден контакт не
замкнутий – указує на те, що стрічка не заправлена, режим «Стоп» (початкове
положення);
- загальний провід
з'єднаний з контактом А – указує на те, що стрічка не заправлена і ВМ
знаходиться в режимі прискореного перемотування вперед чи назад;
- загальний провід
з'єднаний з контактом В – указує на те, що стрічка заправлена та відсунутий
притискний ролик;
- загальний провід
з'єднаний з контактами А та В – указує на режим відтворення, притискний ролик
притиснутий до ведучого валу;
- загальний провід
з'єднаний з контактом С – указує на режим «Пауза»;
- загальний провід
з'єднаний з контактами С та В – указує на режим прискореного «Відтворення» вперед
чи назад.
Багато несправностей ВМ пов’язані
з поганими контактами перемикачів або погано відрегульованим
режимним перемикачем. Досить розповсюджена проблема механічних режимних
перемикачів – високий опір контакту, наприклад, через утворення на їхній
поверхні плівки від тютюнового диму. Чищення перемикача спеціальним засобом для
очищення контактів часто відновлює правильне функціонування.
Перемикачі другого типу псуються
рідше. Це насправді не перемикачі, а оптичні датчики, схожі на диск-кодер з
отворами. Вони складаються з двох пар
інфрачервоних світлодіодов і фототранзисторів, закріплених так, що між ними
знаходиться непрозорий диск. У диску, що обертається разом з кулачком, є кілька
отворів.
Коли інфрачервоні промені проходять через отвори в диску, один чи оба
фототранзистора відмикаються і пропускають струм, повідомляючи системі
керування про положення кулачка. Позначимо ці два фототранзистори буквами А та В.
Коли на них попадають інфрачервоні промені від світлодіодів, вони проводять
струм (включаються). Це те ж саме, що і замикання механічного контакту –
електричний струм йде через фототранзистор на систему керування. Режимний
перемикач і система керування можуть працювати так: включений фототранзистор А
вказує на перше положення кулачка, включений В на друге, а одночасно включені
фототранзистори А и В на третє.
З'єднаний з кулачком диск із двома парами інфрачервоних світлодіодів і
фототранзисторів повідомляє системі керування про режим роботи (рис. 5).

Рисунок 5 – Типові положення кулачка для різних режимів
роботи
Датчик
роси
призначений для повідомлення системі керування про високу вологість усередині
апарата. Це може бути наслідком переміщення ВМ із холодного місця в тепле, коли
відбувається конденсація вологи. Волога може викликати прилипання стрічки до
блоку обертових голівок, а можливо, і до інших елементів стрічкопротягувального
механізму. Наслідком цього можуть бути серйозні ушкодження стрічки і верхнього
циліндра. Електричний опір датчика роси прямо пропорційно вологості. Тому з
ростом вологості росте опір датчика роси. Наприклад, опір датчика роси в дуже
сухому повітрі складає 25 кОм і 1 мОм у дуже вологій атмосфері. Якщо опір
датчика роси більше деякого значення, система керування блокує вмикання ВМ.
Якщо немає ні високої вологості, ні роси, але на передній панелі з'являється
слово DEW (Роса), спробуйте приєднати паралельно датчику роси резистор 10 кОм
і перевірте, чи запрацює ВМ.
2 Настройка стрічкопротягувального
механізму відеомагнітофону
Для настройки СПМ необхідний
осцилограф і тестова касета з записаним сигналом stair step (чорно-білі вертикальні смуги з звуковим сигналом 6кГц).
"Земля" осцилографа з'єднують з "Земля" відеомагнітофона.
Щуп приєднується до точки з частотно-модульованим відеосигналом (РВ FM, VIDEO
ENV, PB RF, RF ENVELOPE). На вхід зовнішньої розгортки подається сигнал HEAD
SWITCH (меандру 25 Гц). Сигнал при справному СПМ повинний
представляти безупинну смугу
високочастотного сигналу (1 - рис. 6) Розмах її складає 0,4 – 0,8 В. Якщо стійки неправильно
відрегульовані по висоті, то на сигналі будуть спостерігатися складки, сигнал
буде "горбитися" (2 – 5 рис.6).
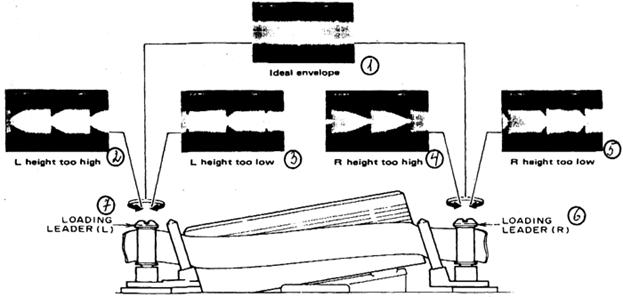
Рисунок 6 – Регулювання
напрямних стойок
Якщо установити розгортку в
районі 25 Гц, то буде помітна сегментність сигналу. Кожен сегмент являє собою
сигнал з однієї відеоголівки. Сигнал перемикання HD SWITCH з частотою 25 Гц
комутує сигнал на виході мікросхеми попереднього підсилювача, за рахунок чого
забезпечується безперервність відеосигналу. Якщо одна з головок забруднена, то
це проявляється в тому, що розмах одного із сегментів, а точніше кожного
другого сегмента буде різко зменшений у порівнянні із сусіднім.
Якщо висота направляючих стойок
сильно збита, то візуально на екрані телевізора будуть спостерігатись горизонтальні шумові смуги. Чим більше збита
висота, тим більше буде смуг. На
осцилографі це буде виявлятися в частих
вертикальних складках на сигналі. Якщо ж висота небагато відрізняється від
номінальної, то сигнал буде звужуватися
по краях сегмента. Якщо сигнал звужується з лівого краю сегмента, то не
виставлена по висоті ліва стійка, ну а права частина сигналу – права
стійка. Необхідно відключити трекинг
і ручним регулюванням його виставити
максимальний розмах сигналу РВ RF на осцилографі. Регулюванням висоти стойок
домагаються максимального рівня сигналу на всьому сегменті. Якщо не вдалося
усунути провал між сегментами, то ймовірно збита точка HEAD SWITCH POINT. На
екрані телевізора в цьому випадку спостерігається постійна широка горизонтальна
шумова смуга, хоча в деяких випадках вона може з'являтися з деякою періодичністю.
У цьому випадку регулюють змінний резистор з написом HD SWITCH POINT (PG POS ,
PG ММ). Покрутивши його усувають розриву між сегментами. У сучасних
відеомагнітофонах регулювання SWITCH POINT виконується цифровими способами у
сервісному режимі.
Для настройки синхро-звукової
головки щуп осцилографа підключають на НЧ вихід звуку і регулюванням гвинтів на
площадці аудіо/синхроголовка домагаються максимального розмаху сигналу. Великою
гаєчкою регулюється фаза синхросигналу (А/С head phase (Х-Value) [JVC]).
Щуп осцилографа знов підключається до точки РВ RF. Стрічку із сигналом stair step переводять у режим
відтворення. Ручний трекинг ставиться в середнє положення. Фазу синхросигналу
регулює конусна гайка, що небагато (на
0,5 см) переміщає аудіо/синхроголовку уздовж стрічки. Роблячи рух
синхроголовкою уздовж стрічки, домагаються максимального розмаху. Перед
початком регулювання необхідно відпустити фіксуючі гвинти, а після знову них
затягти. Іноді виставляється максимальний сигнал по осцилографу.
У режимі "Пауза" на
зображенні з'являється перешкода. Усувається проблема, як правило, невеликим
відхиленням висоти правої напрямної стойки від номінальної. На зображенні це не
проявляється ніяк, а пауза навіть у двухголовочного ВМ виходить на рівні
чотирьохголовочного.