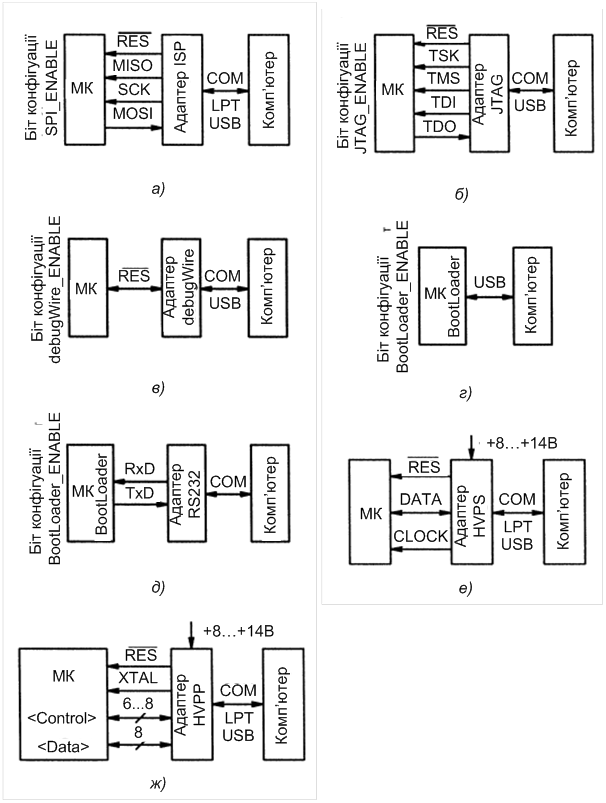
Ще
один цікавий напрям — це віддалене програмування через програму -
завантажувальник (BootLoader). Заздалегідь в МК «прошивається» коротка
завантажувальна програма, яка за певних умов може перепрограмувати свій власний
FLASH-ПЗП і осередки EEPROM. Коди нової прошивки передаються в МК з комп’ютера
по одному з доступних каналів зв'язку: USB, COM, I2C, IrDА. Якщо комп'ютер
програматора буде підключений до Інтернету, то змінити прошивку можна з іншого
видаленого комп'ютера, знаходячись у будь-якій точці Земної кулі.
Мікросхем, які підтримують усі відомі способи
«послідовно-паралельного» програмування, не існує. Зазвичай доступні один, два
або три різні способи. Найважливіше, що усі сучасні МК можна запрограмувати
внутрішньосхемно. Це дозволяє використати прості і надійні програматори,
працюючі в протоколі SPI (Serial Programming Interface), задіюються лінії портів з назвами MISO, MOSI,
SCK.
2 Підсистема живлення
Для живлення будь-якого МК потрібно, як мінімум, два
дроти: позитивний ("плюс", "Power supply") і негативний
("мінус", "Ground reference"). Позначають їх в Data-sheet і на схемах такими скороченнями (рисунок 2) :
-
Vсс (Voltage
Collector - to - Collector) або VDD
(Voltage Drain - to - Drain);
-
GND (Ground) або VSS (Voltage Source - to -
Source).
Внутрішній опір МК позначається змінним резистором RX. Чому змінним? Тому, що
струм споживання МК змінюється під час виконання програми. Залежить він також
від режиму роботи, напруги живлення, температури, тактової частоти,
навантаження на вихідні лінії. У "сплячому" режимі струм складає
одиниці мікроампер, в робочому –
десятки міліампер, у максимальному –
0,1...0,3 А. Конкретні значення наводяться в Data - sheet.
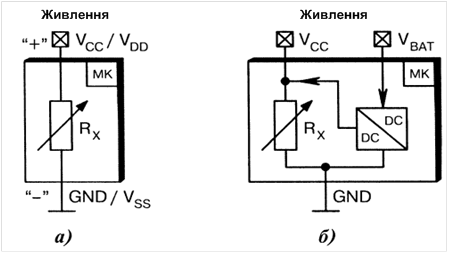
Рисунок 2 – Двопровідне
живлення МК: а) базова схема; б) вбудоване коло резервного батарейного живлення
VBAT з DC/DC перетворювачем
напруги.
Таблиця 1 – Варіанти позначення
виводів живлення МК
|
Вивід МК
|
Назначение
|
Пари умовних
позначень в Data - sheet
|
|
Живлення
|
Позитивний,
«плюс»
|
VDD
|
Vсс
|
Vсс
|
VDD
|
|
Загальний
|
Негативний,
«минуc»
|
VSS
|
GND
|
VSS
|
GND
|
2.1 Організація живлення в МК
Двопровідне живлення сучасним МК досталось у спадок
від i8048/i8051. Зараз воно в основному застосовується в малогабаритних МК з
числом виводів 6... 18, наприклад, в Atmel ATtiny, Microchip PIC10/12. Міра
вимушена, оскільки вільних виводів катастрофічно бракує. З розвитком технології
до складу МК стали вводити аналогові вузли АЦП/ЦАП, які дуже чутливі до зававд.
Стався природний перехід на трьох- (рис. 3), чотирьох- (рис. 4, а – в) і багатопровідні (рис. 5, а, б) схеми живлення. Додавання ланок
AVCC (Analog VCC) і AGND (Analog GND) дозволяє розв'язати між собою аналогові
і цифрові частини мікросхеми, зменшити імпульсні завади, підвищити
інструментальну точність каналів АЦП і ЦАП. Змінні резистори RA і R0
відрізняються між собою опорами. У часі вони теж змінюються за різними
законами. Наприклад, в робочому режимі "цифровий" струм значно
більше "аналогового". Отже, RA більше, ніж RD.
У режимі очікування ситуація може змінитися з точністю до навпаки.
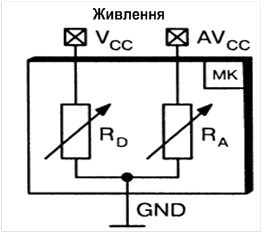
Рисунок 3 – Трьохпровідне живленняМК.
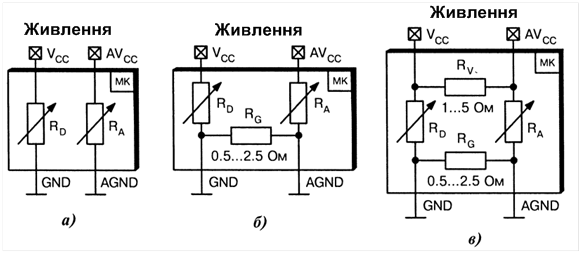
Рисунок 4
– Чотирьохпровідне живлення МК : а)
повна розв'язка; б) подвійний загальний дріт; в) подвійний загальний дріт і
подвійне живлення.
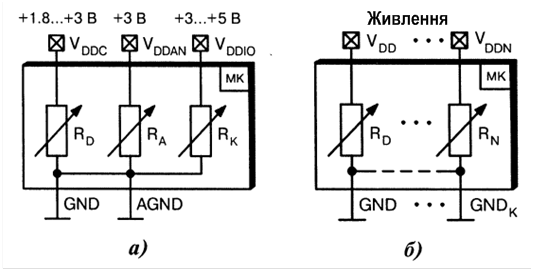
Рисунок 5 – Багатопровідне живлення МК: а) різні діапазони напруги для процесорного ядра
і периферійних ліній введення/виводу; б) різне число виводів живлення і
загального дроту.
2.2 Фільтрація завад
Якщо подивитися на осцилограму
струму споживання МК, то в ній можна помітити низькочастотну (НЧ) і високочастотну (ВЧ) складові. Як наслідок,
коливання струму призводять до появи НЧ- і ВЧ - завад на клемах живлення. Для
їх послаблення використовують стандартні рішення у вигляді зв'язки конденсаторів
(рис. 6, рис. 7), LC - і RС - фільтрів (рис.
8, рис. 9).
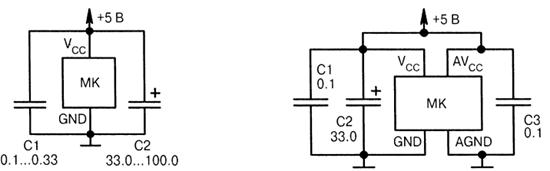
Рисунок 6 – Фільтрація завад в двохпровідній схемі живлення Рисунок 7 – Фільтрація завад в чотирьохпровідній схемі живлення.
Неполярні конденсатори С1, С3 послабляють ВЧ-завади.
Їх наявність обов’язкова біля будь-якого МК, причому максимально близько від
виводів живлення (не більше 50 мм). Конденсатори мають бути керамічні,
наприклад, К10-17 або SMD типу 0603... 1206.
Базовий номінал ємності 0,1 мкФ вибраний умовно, тому
що його легко запам'ятати. Пристрій нормально функціонуватиме і при 0,068 мкФ,
і при 0,15...0,22 мкФ. Іноді паралельно конденсатору С1ставят ще одну неполярну
ємність 1000 пФ, яка знижує рівень радіовипромінювань. Такий спосіб
застосовують в професійній апаратурі, щоб увійти до допуску при перевірках
виробу на електромагнітну сумісність і радіозавади. Полярний конденсатор С2
бажано використати танталовий, оскільки він краще подавлює імпульсні завади.
При виборі ємності можна керуватися емпіричним правилом, яке запозичене з
багаторічної практики застосування мережевих джерел живлення, – 1000 мкФ на
кожен ампер струму навантаження. Наприклад, якщо цифрова частина МК споживає
струм 10...30 мА, то досить поставити конденсатор С2 ємністю 10...30 мкФ з робочою
напругою не менше 6,3В. Рекомендують вибирати конденсатори з напругою 10... 16
В, оскільки підвищується надійність в експлуатації і, головне, знижується
внутрішній імпеданс, що дозволяє краще фільтрувати завади.
Конденсатор С2 обов'язковий при живленні від
акумулятора як накопичувач енергії, а також при значних коливаннях і скачках
напруги. У деяких випадках його функцію виконує конденсатор фільтру мережевого
випрямляча або стабілізатора напруги.
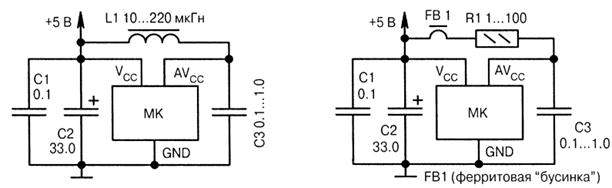
Рисунок 8 – Фільтрація завад LC-фільтром.
Рисунок 9 – Фільтрація завад RС-фільтром.
Котушка індуктивності L1 розв'язує цифрову і аналогову
частини по високій частоті. Якщо її не ставити, то може погіршати точність
виміру АЦП і стабільність порогу спрацьовування аналогового компаратора. Як ні
парадоксально, але значну частину завад по живленню створюють внутрішні
цифрові вузли МК, тому LC - і RС - фільтри захищають контролер від ... самого
себе. Номінал індуктивності L1 не особливо критичний і може змінюватися в
широких межах.
Феритова "бусинка" FBI (Ferrite Bead) є
провідник, пропущений через феритове кільце або циліндр. Цей елемент сприяє
зниженню високочастотних випромінювань, які можна зафіксувати лише спеціальними
вимірювальними радіоприймачами. Такі випробування обов'язкові при сертифікації
продукції.
2.3 Діапазон живлення
Розрізняють вузько- і широкодіапазонні МК (таблиця 2).
Класифікаційною ознакою служать допустимі межі робочого живлення, при яких виробник
ще гарантує технічні параметри згідно Data-sheet. "Низьковольтні"
варіанти МК відрізняються додаванням букви "L" (Low) або
"V" (Very low) в назві. Наприклад, вузький діапазон – 4,5...5,5 В
(ATmega128, PIC16F628A), широкий діапазон – 2,7...5,5 В (ATmega128L), 2...5,5 В
(PIC16LF628A).
Таблиця 2 – Межі зміни напруги живлення МК
|
Діапазон живлення
|
Розкид [%]
|
Напруга живлення [В]
|
|
Вузький
|
±5;±10;±15
|
2,7...3,6;
3,0...3,6; 4,5...5,5; 4,75...5,25
|
|
Широкий
|
±35; ±40; ±45
|
1,8...5,5;
1,8...6,5; 2,0...5,5; 2,7...5,5
|
Традиційно в аматорських розробках використовують
живлення 5 В, хоча в останній час все
частіше переходять на діапазон 2,7...3,6 В. Судячи з форумів в Internet, МК з вузьким і широким діапазоном живлення
виготовляються по одному і тому ж технологічному процесу, але внаслідок
природного розкиду параметрів, розбраковуються на групи "Гірше -
краще". Це не означає, що МК з діапазоном 4,5...5,5 В не працюватиме при
зниженому до 3В живленні. Буде! Проте не можна гарантувати його стійкий запуск
при крайніх значеннях температури, тактової частоти і навантажень.
Загальне правило, коли потрібна максимальна швидкодія,
то підвищують напруга живлення і вибирають вузько діапазонний МК, коли потрібно
мінімальний струм споживання – навпаки.
3 Підсистема початкового скидання
МК складається із статичних тригерів, регістрів і
лічильників. Після подання живлення їх потрібно примусово встановити в певний
логічний стан, інакше із-за загального хаосу виконання програми стане непередбачуваним.
Імпульс початкового скидання подається на виводи RST (ReSeT) або RES (інверсний
RESet). Відрізняються вони між собою, відповідно, позитивною (рис. 10) і
негативною (рис. 11) формою сигналу.

Рисунок 10 – Скидання імпульсом позитивної форми.
Рисунок 11 – Скидання імпульсом негативної форми.
Резистори RRST і RRES
напівпровідникові. Їх роль грають не повністю закриті польові транзистори, що
знаходяться усередині МК. Призначення резисторів – забезпечити прив'язку входу
тригера Шмідта DD1 до загального дроту або до шини живлення. Тим самим коло скидання
не "висить у повітрі" і не буде ловити зовнішні завади. Діод VD1
захищає вхід скидання від статичної електрики і випадкових стрибків негативного напрузі. Струм через діод в
імпульсі не повинен перевищувати 10...20 мА.
Початковий скид у сучасних МК
проводиться в таких випадках (рис. 12):
-
Power-On - внутрішній автоматичне
скидання, який активізується відразу після подачі живлення;
-
Brown-Out - скидання від
внутрішнього детектора «просідань» напруги живлення;
-
External Reset - зовнішній скид низьким
рівнем на виводі RES;
-
Watch-Dog - скидання від
внутрішнього «сторожового» таймера при випадковій зупинці роботи центрального процесора
або зависанні програми;
-
JTAG - програмний скид через
налагоджувальний інтерфейс JTAG.

Рисунок 12 – Підсистема початкового сбросу МК
Усі джерела скидання рівноцінні, що підкреслює
логічний елемент "АБО", що знаходиться усередині МК. Установка режимів скидання виконується бітами конфігурації, а також програмно-доступними
регістрами з області SFR. Настроюватися
можуть: поріг спрацьовування детектора напруги, що "просіла",
тривалість часу затримки таймера очікування Watch - Dog, моменти
включення/відключення генератора G1.
Вузол апаратного скидання Power - On є присутнім в усіх без виключення МК. Якщо напруга
живлення стабільна в часі і подається різким стрибком, то зовнішні елементи для
скидання теоретично взагалі не потрібні. Скидання виконується автоматично
вузлом Power - On при досягненню певного порогу.
При високій швидкості наростання живлення (орієнтовно
за час не більше 1...5 мс) вхід скидання RES підключають до кола VСС трьома
способами: безпосередньо, через зовнішній резистор опором 1-10 кОм або
залишають вільним, покладаючись на внутрішній резистор МК.
Перший варіант повністю усуває шлях перешкодам, але
виключає скидання кнопкою і можливість повторного програмування. Другий варіант
дозволяє підключити кнопку скидання, що
зручно при лабораторному макетуванні в домашніх умовах. Третій варіант
дозволяється за відсутності перешкод і наявності усередині МК резистора підтяжки
RRES опором до 100 кОм.
Якщо напруга живлення наростає більше тривалий час
(для різних сімейств МК по-різному), то рекомендується установка зовнішніх RС -ланок
(рис. 13, а, б) із стандартними значеннями:
- R1 = 10 кОм,
С1 = 0,1 мкФ при часі наростання 5...20 мс. Наприклад, подача живлення Vcc
перемикачем, який розташовується між інтегральним стабілізатором напруги +5 В
і МК;
- R1 = 10 кОм,
С1 = 10мкФ при часі наростання 20...100мс. Це актуально, наприклад, при
включенні пристрою в мережу 220 В загальним тумблером. Якщо ємність
конденсатора С1 більше 1 мкФ, то для прискорення його розряду ставлять діод VD1
типу 1N4148 (КД522Б), а для захисту входу скидання від перенапруги ще і
резистор R2. Ці перестраховки подовжують МК життя.
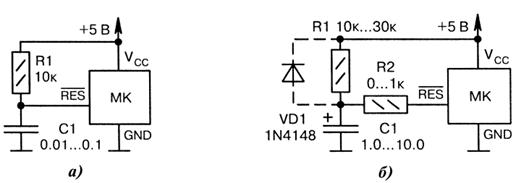
Рисунок 13 –
Скидання зовнішньою RС ланкою:
а) при середньому
часу наростання живлення; б) при великому часі наростання живлення.
Вузол детектора Brown
- Out з'явився в архітектурі МК порівняно недавно. Зокрема, в сімействі
Atmel AT90S його ще не було, що призводило до
збоїв і мимовільному стиранню елементів пам'яті EEPROM. Тому сімейство
AT90S було повністю зняте з виробництва і замінено сімействами ATmega, ATtiny,
в яких детектор Brown - Out передбачений на постійній основі.
Детекторне коло вимірює напругу живлення VСС і
виробляє сигнал скидання досягши програмно заданого порогу в районі 2,4 В. Мається
гістерезис 0,1...0,15 В, що перешкоджає повторному рестарту при невеликих
коливаннях напруги. В результаті підвищується завадостійкість при живленні від
напіврозряджених батарейках/акумуляторах, а також при потужних електромагнітних
наведеннях.
Детектор називається "Brown-Out", оскільки
відстежує короткочасне просідання
напруги. Детектор Brown - Out можна включити і вимкнути установкою певних біт
конфігурації. Ними же задаються пороги спрацьовування напруги 2...4 В, які, до
речі, мають пристойний технологічний розкид.
Тут знаходиться "підводний камінь", об який
часто "спотикаються" розробники, якщо встановлюють поріг
спрацьовування детектора Brown - Out рівним або вище, ніж робоче живлення.
Типовий приклад: VCC = 3,6 В, а біти конфігурації
налаштовані на поріг 4 В. У такому разі МК орієнтовно через секунду після
подання живлення скинеться внутрішнім сигналом Brown - Out, потім знову почне
програму і знову скинеться, не встигнувши толком нічого зробити. Тому первинне
відлагодження програмного забезпечення необхідно проводити при вимкненому вузлі
Brown - Out, але потім обов'язково його включить, перевірити і постійно
експлуатувати на об'єкті.
Вузол Watch -
Dog - "сторожовий таймер". Якщо Watch - Dog таймер включений, то
він постійно збільшує значення свого лічильника. Через проміжок часу, рівний
"тайм-ауту" Watch - Dog, виникне примусове скидання МК. Проте,
користувач має можливість вставити в програму спеціальну команду WDR (Watch -
Dog Reset), щоб обнулити лічильник і тим самим відстрочити момент скидання.
Якщо відстрочення робити вчасно, то пристрій нормально функціонує, а розробник
буде впевнений в тому, що програма "не зациклилася". Час
"тайм-ауту" задається регістрами з області SFR і може складати від
однієї мілісекунди до декількох секунд.
Тактується Watch - Dog від окремого внутрішнього RC-генератора
GI частотою 0,1...1 МГц, що дозволяє йому виконувати свою функцію навіть при
повному зникненні зовнішнього тактового сигналу. Частота генерації залежить від
температури і напруги живлення. Загальний дозвіл/заборонена роботи
"сторожового таймера" встановлюється конфігураційними бітами.
При початкових заводських налаштуваннях
конфігураційних біт, Watch - Dog за умовчанням відключений і ніяк не впливає на
роботу МК.
Вузол зовнішнього скидання активізується, якщо на вході RES впродовж декількох мікросекунд утримується низький рівень. На більш короткі імпульси вхід
скидання не реагує. Це зроблено спеціально, щоб підвищити завадостійкість. Джерелами зовнішнього скидання можуть служити:
механічна кнопка, керує мий логічний рівень, мікросхема монітора живлення.
Вузол скидання через JTAG характерний тільки для найновіших МК, в яких є
присутнім відповідний інтерфейс. Програмісту надається можливість при відлагодженні послати команду з умовною назвою
"MK_RESET", примусово скинути МК в
початкове положення. Така технологія корисна для досвідчених розробників,
оскільки вимагає спеціальних знань і навичок.
Вибір конкретної схеми скидання
залежить від умов експлуатації. Наприклад, якщо сумарна ємність конденсаторів фільтру між VCC і GND складає більше
1000 мкФ, то, швидше за все, знадобиться зовнішня RС – ланка (рис. 13, а, б).
Якщо поряд з виводом RES на друкованій платі проходить силове комутаційне коло,
то для з'ясування причин збоїв корисно тимчасово з’єднати лінію скидання МК з
живленням. Якщо прилад розташовується поблизу від джерела потужних індустріальних завад, то на вході
скидання рекомендується поставити додаткову мікросхему супервізора живлення,
яка продублює вузол Brown - Out.
4 Підсистема синхронізації
Для того, щоб МК запрацював, необхідно подати на центральний
процесор тактові імпульси. Чим вище їх частота, тим швидше виконуються
операції, а чим нижче їх частота, тим менше споживання струму. Формуванням
тактових частот займається підсистема синхронізації. На її структурній схемі (рис.
14) є декілька вбудованих генераторних вузлів (on - chip oscillator): HF(High
Frequency) - високочастотний, LF (Low Frequency) - низькочастотний, CLK (CLocK)
- тактування.
З чотирьох верхніх блоків, тільки HF-генератор використовує
два виводи підключення ХТ1, ХТ2. Тим самим підкреслюється, що він розрахований на
схему із зворотним зв'язком.
Виводи ХТ1, ХТ2 основного генератора в різних МК
можуть позначатися по-різному: XTAL1, XTAL2, XI, Х2, XIN, XOUT, OSC1, OSC2.
Головне, запам'ятати, що першим по порядку йде вхід (XXXXl, "In"),
потім вихід (ХХХХ2, "Out").
Управління режимами підсистеми синхронізації
здійснюється через біти конфігурації. Вони перемикають канали мультиплексора,
настроюють частоту внутрішнього RС-генератора і так далі. Вони ж можуть
дозволити/заборонити видачу сигналу CLKOUT (рис. 14) з окремої лінії порту, з
частотою, у декілька разів менше тактовою. Ця функція є присутньою не в усіх
МК.

Рисунок 14 – Підсистема
синхронізації МК
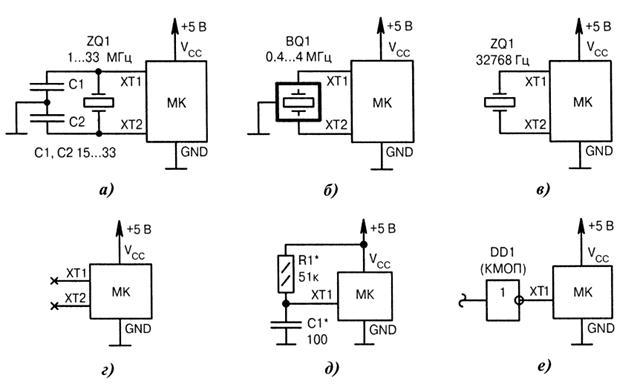
Рисунок 15 –
Схеми формування тактової частоти : а) від ВЧ кварцового резонатора; б)
від керамічного резонатора; в) від НЧ кварцового резонатора; г) від
внутрішнього генератора; д) від RС-ланки; е) від зовнішніх імпульсів.
МК працює в таких режимах:
-
від
високочастотного кварцового резонатора 1...33 Мгц (рис. 15, а);
-
від середньо частотного
керамічного резонатора 0,4...4 Мгц (рис. 15, б);
-
від низькочастотного
кварцового резонатора 10... 100 кГц (рис. 15, в);
-
від внутрішнього
RС - генератора 1; 2; 4; 8 Мгц (рис. 15, г);
-
від зовнішньої
RС - ланки 0,4...12 Мгц (рис. 15, д);
-
від зовнішніх
синхроімпульсів 0...40 Мгц (рис. 15, е).
Усі перераховані
режими роботи задаються при програмуванні
конфігураційних бітів
5 Виконавчі пристрої мікропроцесорних
систем
Практично жодна мікропроцесорна система (МПС) не може обійтися без таких
елементів, як виконавчі пристрої. Головне призначення будь-якої системи – це
управління яким-небудь зовнішнім механізмом. Це можуть бути електродвигуни,
нагрівачі, електромагнітні клапани і т.п. Тому, окрім датчиків, кнопок
управління і елементів індикації до мікроконтролера (МК) обов'язково доведеться
підключати і виконавчі пристрої. Для управління зовнішніми пристроями
використовуються ті ж самі порти введення/виведення МК, які працюють на
виведення. Сигнали з будь-якою з ліній будь-якого порту легко можуть бути
використані для включення і виключення зовнішнього пристрою. Необхідно лише
підсилити керуючий сигнал за потужністю до необхідного рівня. Для цього
застосовуються різні схеми узгодження. Вибір схеми залежить від типу
виконавчого пристрою.
У найпростішому випадку можна застосувати
транзисторний ключ (рисунок 16). При використанні транзистора КТ315Г можна
керувати зовнішніми колами із струмом споживання до 100 мА і напругою UЖ
до 15 В. Транзистор допускає також високу напругу, проте підвищення напруги
можливе при зменшенні струму.
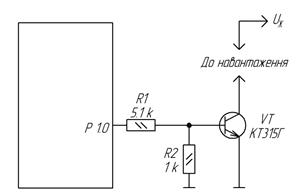
Рисунок 16 –
Найпростіший транзисторний ключ
Для керування ланками з великим струмом
потрібно застосувати потужніший транзистор або цілу транзисторну збірку. При
виборі транзистора не забувайте, що максимально допустимий струм навантаження
для будь-якого з виходів МК не повинен перевищувати величини 20 мА. При складанні програми
потрібно не забувати, що будь-який транзисторний ключ інвертує сигнал. Якщо на
виході Р1.0 (рисунок 16) встановити одиничний рівень, ключ відкривається і
навантаження підключається до джерела живлення. При нульовому рівні на тому ж
виході ключ закривається і навантаження відключається.
Якщо виконавчий механізм, яким повинна керувати МПС,
живиться від мережі змінного струму 220 В, потрібно застосовувати схему
управління з гальванічною розв’язкою. Один з можливих варіантів – релейна схема
управління.
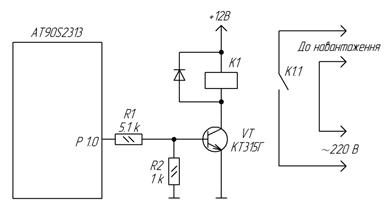
Рисунок 17 –
Виконавчий пристрій з використанням реле
Типовий варіант
схеми управління з використанням реле наведений на рисунку 17. На схемі
представлений електронний ключ, в навантаження якого включено електромагнітне
реле К1. МК за допомогою ключа може вмикати і вимикати
електромагнітне реле. Контакти реле, в свою чергу, керують навантаженням. Така
схема забезпечує комутацію достатньо великої напруги і струму.
Гальванічна розв'язка між всіма колами МПС і силовою
мережею 220 В забезпечує безпеку роботи з цією схемою. Діод VD1 призначений для
захисту елементів схеми від напруги ЕРС самоіндукції, що виникає в котушці К1 у
момент закривання ключа VT1. При виборі електромагнітного реле необхідно
звертати увагу на такі параметри. По-перше, напруга спрацьовування реле. Для
прикладу на рисунку 17 вона має бути рівна 12 В. По-друге, максимально
допустимий струм комутації і максимально допустима напруга для виконавчих
контактів реле. Вони повинні відповідати реальним значенням струму і напруги в
колі навантаження.
У випадку, якщо необхідно керувати великим числом
реле, або інших потужних навантажень, зручно застосовувати мікросхеми ULN2003
або ULN2803. Ці мікросхеми містять відповідно, 7 і 8 транзисторних ключів на
складених транзисторах (схема Дарлінгтона). Вони дозволяють керувати
навантаженням до 500 мА при напрузі до 50 В. При цьому входи цих мікросхем можна підключати
безпосередньо до ліній портів введення/виведення МК. Усередині мікросхем вже є
вбудований захисний діод, який можна підключати або відключати, здійснюючи
зовнішні з'єднання. На рисунку 18 наведений приклад схеми з використанням
мікросхеми ULN2003.
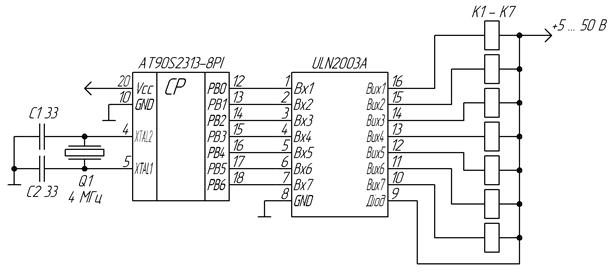
Рисунок 18 – Використання мікросхеми ULN2003
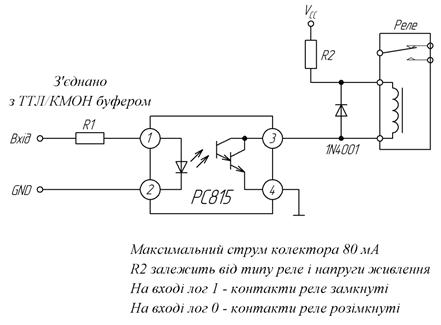
Рисунок 19 – Застосування оптопари
РC815 для керування реле
Оптопари можна використовувати для управління
приладами з малими значеннями струмів, що вимагають гальванічної розв'язки.
Максимальний робочий струм обмежений характеристиками фототранзисторів.
Наприклад, оптопари Дарлінгтона серії РC815 (Sharp, RS175-198) мають максимальне значення вихідного струму
80 мА, достатнє для управління слабкострумовим реле, яке, у свою чергу, здатне
працювати з потужнішими приладами (рисунок 19). Оптопари Дарлінгтона серії
PS2502 (NEC, RS590-424 і RS590-430) підтримують струми до 160 мА.
Коефіцієнт передачі зазвичай досягає до 2000. Напруга,
що керує світлодіодом, дорівнює 1,1 В, максимальний робочий струм - 80 мА.
Максимальна напруга між колектором і емітером фототранзистора складає 40 В, а
час насичення - 100 мкс.
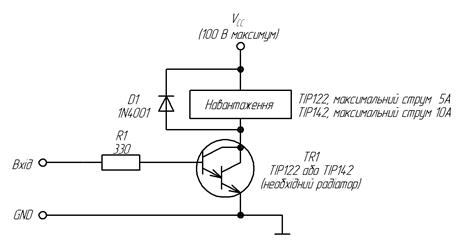
Рисунок
20 – Пристрої|устрої| управління
на транзисторі Дарлінгтона
На
рисунку 20 зображена схема на базі потужного транзистора Дарлінгтона TIP122 або
TIP142. TIP122 керує напругою до 100 В і струмами до 5 А. Максимальна потужність розсіювання - 65 Вт. Транзистори
Дарлінгтона відкриваються при напрузі 1,2 В між базою і колектором і можуть
підсилювати струм у 5000 разів. Отже, напруга на базі, що перевищує 1,2 В,
викликає режим насичення транзистора. База з'єднується з ТТЛ входом через
резистор. TIP142 функціонує при колекторному струмі 10 А. Максимальна робоча
частота цих транзисторів складає 5 МГц. Для індуктивного навантаження повинні
використовуватися захисні діоди.
На
рисунку 21 зображена схема на базі польових МДН транзисторів VN10KM або VN66AF.
Щоб МДН транзистор відкрився, на нього необхідно подати пряму напругу зсуву
близько 0,8 В. Прямий зсув близько 5 В істотно впливає на провідність. Оскільки
вхідний опір пристрою на польовому транзисторі дуже високий, з'єднати його
безпосередньо з вихідним портом МК неможливо. Таким пристроєм слід керувати
через резистор. VN10KM витримує максимальну напругу 60 В і струм 310 мА, VN66AF
працює при максимальній напрузі 60 В і струмі 2 А. Час насичення - близько 15
нс|.
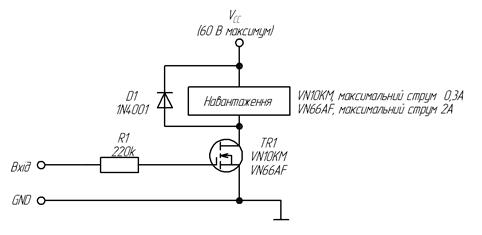
Рисунок 21 – Пристрої управління на польовому транзисторі
Потужні пристрої управління на базі МДН транзисторів
із захистом, які інколи називають твердотільними реле, грають роль
перемикачів в силових колах цифрових систем управління. Вхідне управління
сумісне з логічними рівнями 5 В. У цих елементах використовується вбудована схема
термоконтролю, яка захищає їх від перегріву, короткого замикання і
перевантаження. Такі пристрої, як правило, мають інформаційний вихід, який
низьким рівнем інформує про спрацювання вбудованих кіл захисту.
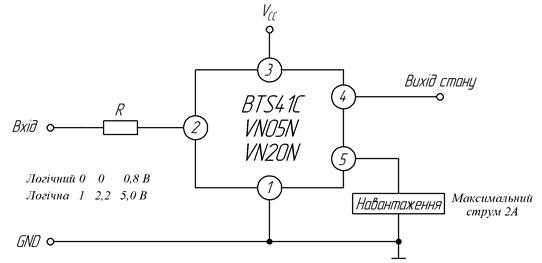
Рисунок 22 – Пристрій управління
на МДН транзисторі із захистом
Транзистор BTS410 (рисунок 22) здатний керувати
напругою в діапазоні 4,9 - 40 В, поріг спрацьовування захисту від
перенапруження порядку 42 - 52 В. Максимальна робоча температура дорівнює 150
°С. Залежно від температури рівень значень струму перевантаження коливається в
межах 3,1 - 21 А. Цей пристрій має низький опір в увімкненому стані у всьому
діапазоні температур. Час вмикання і вимикання складає 60 і 50 мкс відповідно.
Вхідна напруга вмикання змінюється від 2 до 5 В, вимикання – від 0 до 0,8 В. Вхідний струм рівний 25 мкА
при вхідній напрузі 3,5 В.
Два інших приклади таких пристроїв - VN05N і VN20N, їх
виходи і типова схема застосування зображена на рисунку 22. VN05N розрахований
на вихідний струм 12 А, а VN20N - на 28 А. У силових колах цифрових систем
управління можна використовувати твердотільні реле серії КP293.
Як відомо, недоліком електромагнітних реле є їх
недовговічність, пов'язана з підгорянням і швидким зношуванням його контактів.
А також акустичні шуми в процесі його роботи.
Найбільш популярні позитивні риси заміни
електромагнітних реле на оптоелектронні комутаційні вузли - це малі керуючий
струм і напруга, беззвучність і довговічність роботи, можливість роботи в
середовищах постійного і змінного струму, комутації напруги (деяких приладів)
до 400...600 В і струмів до 0,5 А. На рисунку 23 представлена одна з таких
схем.
У цій схемі управління навантаженням (потужність якого
може досягати 600 Вт) здійснюється симістором КУ208. Завдяки розв'язці по
живленню - застосуванню оптоелектронного приладу АОУ103В, кола управління
навантаженням в мережі 220 В і керуючі
схеми повністю розв'язані. Керуюча постійна напруга (або імпульси) амплітудою
1,5...2 В потрапляє від схеми управління через обмежувальний резистор R1 на
вхід оптопари VU1. Керуючий струм не перевищує 5 мА.
За наявності керуючого сигналу, тиристор усередині
оптопари відкривається (його опір в прямому напрямку зменшується до декількох
десятків Ом), і він шунтує діагональ випрямляючого моста VD1. Від випрямляючого
моста напруга проходить на електрод керуючого симістора VST, завдяки чому він
відкривається у відповідні напівперіоди напруги і в навантаженні тече струм.
Використання оптопар АОУ103 залежить від напруги в електричному колі. Так, для
даної схеми та інших з напругою більше 200 В підходить лише оптопара АОУ103В, а
при меншій комутаційній напрузі з літерами А - до 50 В, Б – до 100 В.
При необхідності управління більш потужним
навантаженням, наприклад до 1000 Вт, симістор, як основний пристрій в даній
схемі, що комутує навантаження, слід встановити на охолоджуючий радіатор.
Схожа за принципом роботи схема представлена на
рисунку 24. Тут діагональ випрямного моста замикає
оптосимістор ТО132-40 (або аналогічний ТО125-12,5, ТО106-10 та інші). Їх
основна відмінність один від одного полягає у різних струмах і потужності комутації.
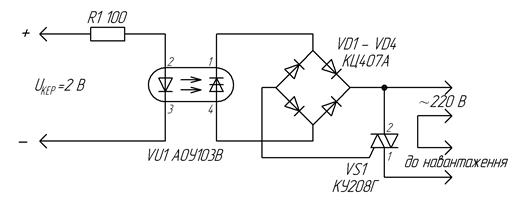
Рисунок
23 – Електрична схема із застосуванням
оптрона
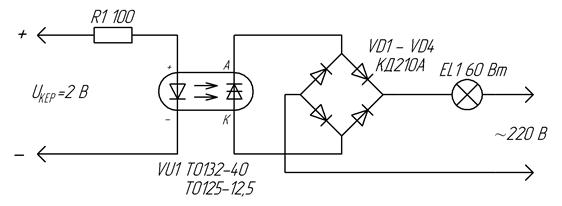
Рисунок
24 – Інший варіант схеми вузла
управління навантаженням із застосуванням оптрона
При середньому навантаженні (більше 60 Вт) діоди слід
встановити на радіатори, а при навантаженні більше 200 Вт їх слід замінити
потужнішими. Струм управління оптосимістором VU1 - 10 мА, напруга 2...3 В.
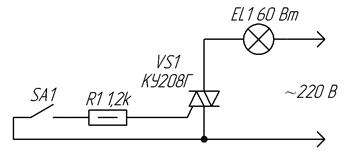
Рисунок
25 – Електрична схема управління
симістором КУ208Г
На рисунку 25 показана схема управління
симістором КУ208Г за допомогою подачі на електрод VS1 керуючої змінної напруги,
через обмежувальний резистор R1.
Поки замкнуті контакти вмикача S1 лампа розжарення
(навантаження EL1) світитиметься. Такий вимикач може бути корисний при
дистанційному управлінні яким-небудь навантаженням або як складова частина
складніших схем – адже замість вимикача
SA1 можна використовувати електронну схему (у тому числі із застосуванням
МДН і оптореле). Симістори КУ208Г
чутливі до "правильної" подачі напруги на керуючий елемент, тому,
якщо вузол не працюватиме відразу, в даному випадку необхідно поміняти місцями
провідники підключення в мережі 220 В (змінити фазування).
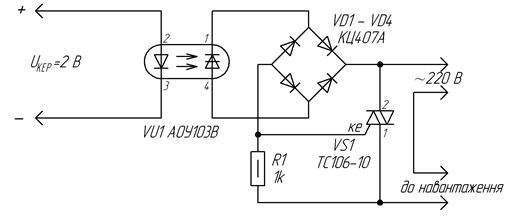
Рисунок
26 – Електрична схема
"гібридного" управління навантаженням
На рисунку 26 представлена схема
гібридного керування навантаженням.
Тут задіяні і оптопара тиристора АОУ103В, і
оптосимістор ТС106-10. У результаті такого схемного рішення вузол володіє
перевагами обох схем (якщо їх розглядати окремо).
На рисунку 27 представлена схема для
керування потужним навантаженням. Силовим керуючим елементом є симістор
ТС171-250, а проміжним - оптосимістор МОС3009 (МОС3052, МОС3010, МОС3012 і
аналогічні за електричними характеристиками). Відмінна особливість цієї
конструкції в тому, що напруга навантаження може складати 380...400 В, а
потужність більше 1000 Вт при керуючому струмі до 10 мА і напрузі 2 В.
Такий вузол без яких-небудь доповнень може керувати,
наприклад, потужним двигуном.
Оптосимістори серії МОС – зарубіжні пристрої, в
деяких випадках вони можуть бути замінені АОУ103В або оптоелектронними МДН-реле
вітчизняного виробництва, наприклад, КР293КП5В, К449КП1ВР, К449КП2ВР, К293КП13П
та аналогічними за електричними характеристиками.
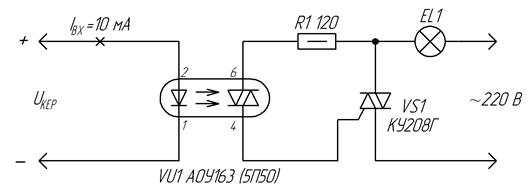
На рисунку 28 показаний ще один
варіант включення - поєднання оптоелектронної розв'язки із застосуванням
оптопари АОУ103В і симістора КУ208Г.
Управління пристроями навантаження ефективно
здійснюється, якщо їх потужність не перевищує 600 Вт. Оптопара АОУ103В дозволяє
самостійно комутувати високовольтне навантаження (з напругою до 350 В), проте струм комутації не повинен перевищувати 100
мА. Тому для управління потужним навантаженням в схему введений симістор
КУ208Г.
Рисунок
28 – Електрична схема оптоелектронної
розв'язки