Пристрої
формування звукових сигналів. Пристрої управління двигунами постійного струму.
Пристрої комутації
1 Пристрої
формування звукових сигналів
2 Пристрої керування двигунами постійного струму
1. Пристрої формування звукових сигналів
П'єзоелектричні динаміки служать для генерації звуків. Вони мають
максимальну вхідну напругу
50 В і номінальний струм 10
мА. На рисунку 1 зображена
схема, що використовує буфер КМОН/ТТЛ для керування таким динаміком. Схема пристрою керування на транзисторі ZTX300 наведена на рисунку 2. Щоб отримати
звук, необхідно подати на вхід послідовність імпульсів.
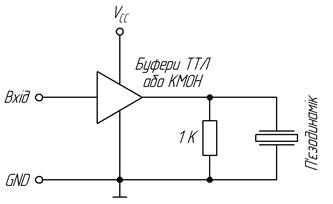
Рисунок 1 –
Схема керування п’єзоелектричним
динаміком на базі буфера ТТЛ/КМОН
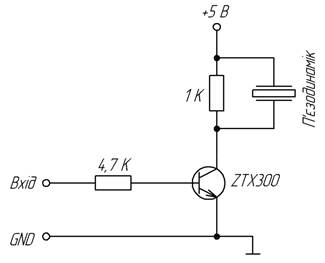
Рисунок 2 – Схема керування п’єзоелектричним динаміком на транзисторі
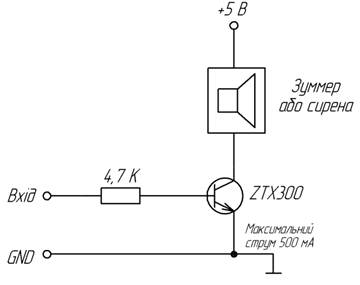
Рисунок 3 – Схема
керування зумером або сиреною
Напівпровідникові зумери – це
автономні динаміки, здатні
генерувати тон, частотою близько 450 Гц. На рисунку 3 наведена схема керування на
транзисторі ZTX300. Для генерації звуку на базу ZTX300 необхідно подати високий рівень напруги. При керуванні сиренами
можна використовувати такі ж схеми.
Ультразвукові перетворювачі
призначені для генерації ультразвуку. Зазвичай вони застосовуються в пристроях дистанційного
керування, вимірювання
і передачі даних, наприклад в ультразвуковому вимірювачі відстаней і детекторах
руху об'єкта. На рисунку 4 зображена схема, яка генерує сигнал частотою 38,4 кГц.

Рисунок 4– Схема
генератора ультразвуку
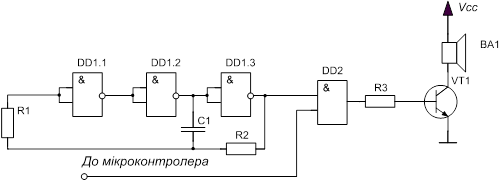
Рисунок 5 – Схема
формування звукового сигналу апаратним способом
У даній схемі ультразвуковий сигнал
генерується лише у тому
випадку, коли на контакт 12 (RESET)
подається сигнал низького рівня. Якщо на цьому вході високий рівень, генерація заборонена.
На рисунку 5 зображена схема формування
звукового сигналу апаратним способом. Схема складається з генератора звукового
діапазону на логічних елементах І та схеми керування звуковим пристроєм. При формуванні МК сигналу логічної "1" імпульси
від генератора проходять
на звуковий пристрій.
2 Пристрої керування двигунами постійного струму
Двигунами постійного струму можна керувати за
допомогою реле або транзисторів (рисунок 6). Одиночне перемикальне реле вмикає і вимикає
двигун, а спарене реле відповідає за напрям обертання (рисунок 7).

Рисунок 1.30
– Пристрій керування двигуном постійного струму на базі реле

Рисунок 7 – Блок-схема мостового пристрою керування L298N
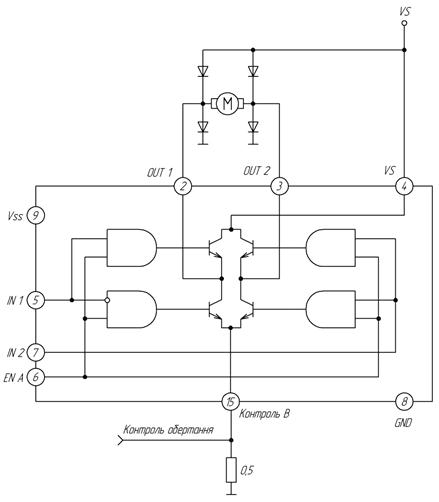
Рисунок 8 – Пристрій керування двигуном
постійного струму
Інший спосіб керування двигунами постійного струму
заснований на використанні мостових схем типу L298N (SGS-Thomson, RS636-384). Це двоканальний
пристрій, в якому присутня потужна напруга до 46 В, струм до 2А на кожен канал.
Такий пристрій працює від рівнів ТТЛ (див. рис. 8). З виводу VS
(контакт 4) подається напруга живлення для двигуна, на вивід Vss (контакт 9) подається напруга
живлення схеми (+5В). Виводи EN A
і EN B (контакти 6 і 11)
відкривають входи двох каналів. Входи IN 1
і IN 2 (контакти 5 і 7) керують
першим каналом, а IN 3 і IN 4 – другим. Емітери транзисторів
з’єднані для підключення зовнішніх датчиків контролю. Типова схема включення
для одного каналу наведена на рисунку 9.
Коли на вході EN A
низький рівень, входи заблоковані і двигун не обертається. Якщо на цей вхід
подати високий рівень, входи відкриваються. Входи IN 1 і IN 2 керують
режимами роботи двигуна таким чином:
- IN 1 - "1", IN 2 -" 0" –
двигун обертається за годинниковою стрілкою;
- IN 1 - "0", IN 2
- "1" – двигун обертається проти
годинникової стрілки;
- IN 1 = IN 2 – двигун не обертається.
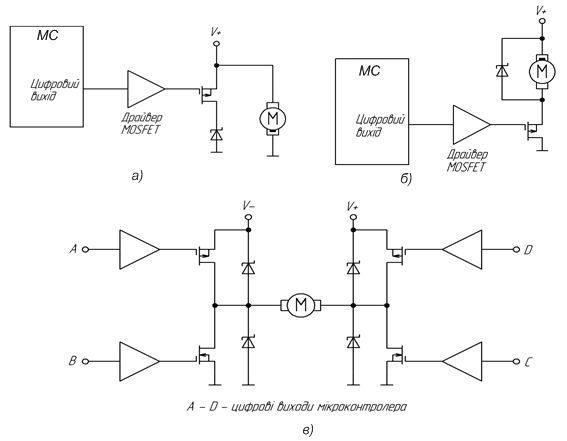
Рисунок 9 – Керування колекторним двигуном
постійного струму: а) схема з верхнім розташуванням ключа; б) схема з нижнім
розташуванням ключа; в) мостова схема
При керуванні колекторними
двигунами постійного струму потрібно регулювати струм, що проходить через
обмотки двигуна. Цей процес охоплює регулювання напрямку магнітного потоку і
величини струму. Проста схема керування наведена на рисунку 9. Дані схеми дозволяють
керувати обертанням двигуна лише в одному напрямку.
Схема з верхнім розташуванням ключа часто
застосовується в системах з підвищеними вимогами до безпеки – коротке замикання
не призводить до увімкнення двигуна, у вимкненому стані обидва виводи обмотки
підключено до спільної точки схеми. Схема з нижнім розташуванням ключа
найдешевша, оскільки для керування силовим транзистором MOSFET досить подавати на затвор сигнал з цифрового виходу МК без
використання спеціального драйвера. Для реверсивного керування двигуном
потрібно використовувати мостову схему включення, наведену на рисунку 9. Частота обертання двигуна регулюється за
допомогою зміни значення напруги на обмотці якоря. При використанні МК цю
напругу можна регулювати за допомогою широтно-імпульсної модуляції.
Для вимірювання частоти обертання двигуна можна
використовувати ефект зворотної ЕРС або використовувати оптоелектронний датчик
положення ротора ("ромашка")
(рис. 10).
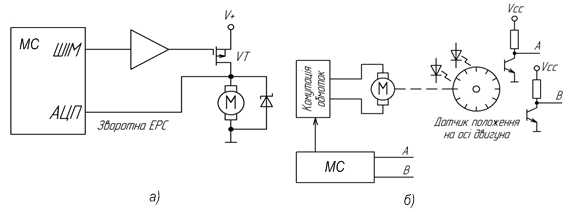
Рисунок 10 –
Вимірювання швидкості обертання двигуна: а) з використанням зворотної ЕРС; б) з
використанням датчика положення ротора
Безколекторні двигуни є прикладом спрощення
конструкції з одночасним ускладненням схеми керування. Двигун не може
самостійно перемикати обмотки (керувати струмом), тому схема керування повинна
самостійно коректно регулювати величину струму в обмотках для забезпечення
рівномірного обертання вала двигуна. Схема керування містить півмостову схему
включення кожного з трьох виводів обмоток. Існують 2 основних типи керування
безколекторним двигуном: з датчиками і без датчиків. Для того, щоб включати
обмотки в потрібній послідовності, необхідно використовувати різні методи
визначення положення ротора. Двигун з датчиком завжди повідомляє МК про
положення ротора. Кожному положенню ротора відповідає певний набір керівних
дій, які подаються на мостову схему включення обмоток.
У двигунах без датчика положення ротора визначається
за величиною ЕРС, що виникає в непідключеній обмотці. Двигуни без датчиків
простіші у виготовленні, але складніші в управлінні. Їх застосовують в умовах,
що не вимагають частих запусків і зупинок. Двигуни з датчиками – кращий вибір
для умов, пов'язаних з періодичними зупинками і запусками. Схеми включення двигуна
наведені на рисунку 11. Складність побудови схем керування не
залежить від типу двигуна. Безколекторні двигуни мають кращі показники
надійності, питомої потужності і економічності в порівнянні з колекторними,
тому рекомендується використовувати безколекторні двигуни.
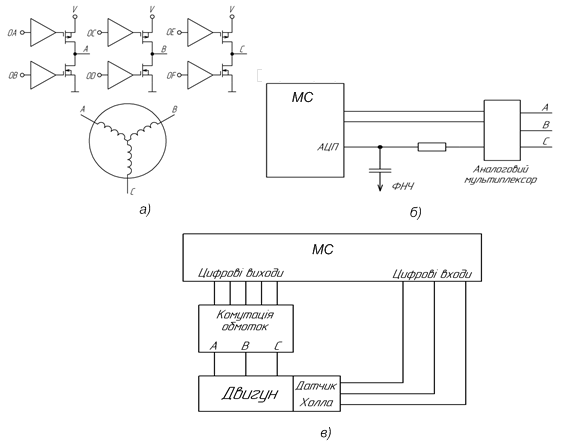
Рисунок 11 –
Керування безколекторним двигуном постійного струму: а) спільна схема
включення; б) схема включення без
датчика положення; в) схема включення з датчиком положення.
3 Пристрої комутації
Аналоговий електронний ключ
можна уявити як електронний аналог реле, що дозволяє МК замикати і розмикати
контакт між двома точками схеми. Аналогові ключі швидші і компактніші ніж реле,
не мають тремтіння контактів і вимагають менший струм для включення.
На рисунку 12, а показано схематичне
зображення аналогового ключа і його внутрішню структуру. Зазвичай ключ
складається з МДН-транзисторів n- і p-типу, з’єднаних паралельно. Коло
керування вмикає або вимикає відразу обидва транзистори. Коли транзистори відкриті, струм
може протікати ними в обох напрямах
однаково – як від входу аналогового ключа до виходу, так і від виходу до входу. Напрямок струму – від входу до
виходу або навпаки – визначається потенціалом керування на вході.
На рисунку 12, б показаний аналоговий ключ з двополярним живленням V+ і V-.
Насправді, деякі ключі можуть працювати і з однополярним живленням (V-
підключений до землі). У деяких ключах потрібний третій вхід напруги (див. рис.
12, в), еквівалентний напрузі живлення логічних кіл.
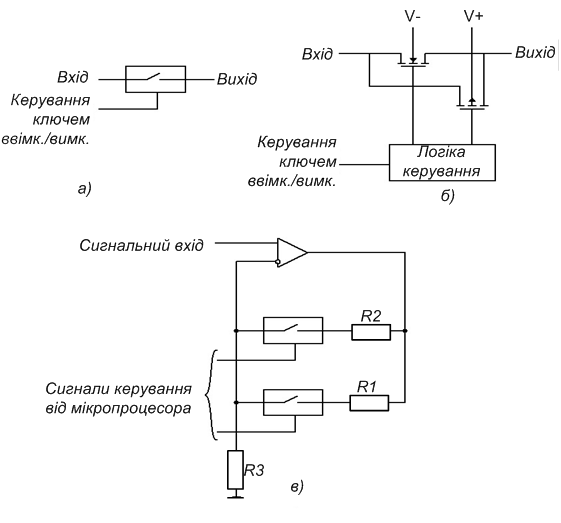
Рисунок 12 –
Аналоговий ключ: керування та застосування
Хоча аналоговий ключ і можна
уявити аналогом твердотільного реле, між ними існують значні відмінності.
Наприклад, контакти реле абсолютно
ізольовані від обмотки реле. Це дозволяє перемикати напругу в сотні вольт без
небезпеки пошкодити МП кола, тобто реле працює як гальванічна розв’язка,
аналогічно оптрону з закритим оптичним каналом. У аналоговому ключі необхідно
подавати живлення на перемикальні транзистори, тому амплітуда напруги сигналу
не може вийти за межі V+ і V-. Якщо напруга вхідного або вихідного сигналу вийде
за ці межі, ключ може вийти з ладу через значний струм між сигнальним
провідником і шиною живлення.
Деякі аналогові ключі
забезпечені захистом від перенапруги. Проте вони не можуть перемикати напруги
вище напруги живлення, але і не виходять з ладу. Ця особливість передбачена для
пристроїв, сигнал на які може надходити навіть тоді, коли напруга живлення
відключається. Типовим прикладом є ІС МAX4511/4512 фірми Maxim/Dallas.
Оскільки аналогові ключі
побудовані з використанням МДН-транзисторів, існує деякий опір контакту в
замкнутому стані, рівний опору стік-витік транзистора. У перших модифікаціях
ключів цей опір вимірювався сотнями Ом, проте в останніх розробках понижено до
часток Ома.
Час вмикання і вимикання
аналогових ключів позначається як Ton і Toff і змінюється
від наносекунд до мікросекунд.
Аналогові ключі можуть бути
використані для регулювання коефіцієнта підсилення операційного підсилювача
(ОП), як показано на рисунку 12, в.
Два резистори R1 і R2 перемикаються аналоговим ключем під
дією зовнішнього МК. У даному колі встановленням сигналів керування МК (код 01,
10 і 11) можна вибрати один з трьох коефіцієнтів підсилення, пропорційних
величинам R1, R2 і R1 паралельно R2. Відмітимо, що напруга живлення
аналогових ключів має бути вище за амплітуду вхідних і вихідних сигналів,
тобто, у загальному випадку, напруги живлення ОП. Насправді, якщо напруга
живлення ОП стабілізована, то напруга живлення аналогового ключа має бути лише
трохи більша максимальної напруги на неінвертувальному вході ОП.
На рисунку 13 зображений 4-1 (4 входи/1 вихід) аналоговий мультиплексор. Аналоговий
мультиплексор складається з двох або більше аналогових ключів з одним спільним
виходом (позначеним Y на схемі). За допомогою входів керування можна вибрати,
який з контактів буде замкнутий, і, таким чином, який з входів X1...Х4 буде з’єднаний з виходом Y.

Рисунок 13 – Аналоговий
мультиплексор
Як і аналоговий ключ,
мультиплексор характеризується такими параметрами, як діапазон вхідної напруги,
опір у відкритому і закритому станах, час перемикання. Типове використання
аналогових мультиплексорів – вибір джерела звукового сигналу в аудіопристроях.
Інтегральна схема МAX349 фірми
Maxim/Dallas - це один 8-1 аналоговий мультиплексор з інтерфейсом SPI.
Інтегральна схема (ІС) МAX350 складається з двох 4-1 аналогових
мультиплексорів, також з керуванням за допомогою інтерфейсу SPI.
