Архітектура МПС. Структура та
функціонування МПС
1 Архітектура мікропроцесорної системи
2 Структура та функціонування мікропроцесорної системи
3 Архітектура мікропроцесора i8085
1 Архітектура мікропроцесорної системи
Поняття архітектури
мікропроцесора визначає його складові частини, а також зв'язки та взаємодію між
ними. Архітектура містить: 1) структурну схему самого МП; 2) програмну модель
МП (опис функцій регістрів); 3) інформацію про організацію пам'яті (ємність
пам'яті та способи її адресації); 4) опис організації процедур
введення-виведення.
Існують два основних типи
архітектури мікропроцесорної системи – фоннейманівська та гарвардська. Структурні схеми обох архітектур містять:
процесорний елемент, пам'ять, інтерфейси введення-виведення (ІВВ) і пристрої введення-виведення
(ПВВ). Пам'ять і ІВВ для різних типів МП можуть бути як внутрішніми (розміщуватися на тому ж кристалі, що і
процесорний елемент), так і зовнішніми. Процесорний елемент містить регістри,
арифметико-логічний пристрій (АЛП), пристрій керування і виконує функції
обробки даних та керування процесами обміну інформацією. Пам'ять забезпечує
зберігання кодів команд програми і даних. Інтерфейси призначені для зв'язку з
ПВВ (наприклад, з клавіатурою, дисплеєм, принтерами, датчиками інформації).
Усі елементи структурної схеми з'єднані за допомогою шин.
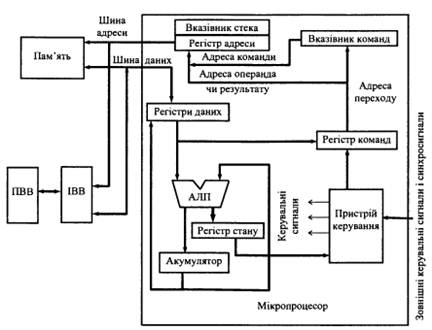
Рисунок 1 – Структурна схема з процесором фоннейманівської
архітектури
Розширену структурну схему
МПС з процесором фоннейманівської архітектури наведено на рисунку 1.
Схема процесора містить
пристрій керування, АЛП, регістри: адреси, даних, команд, стану, акумулятор,
лічильник команд та вказівник стека.
Пристрій керування відповідно до кодів команд та
зовнішніх сигналів керування і сигналів синхронізації виробляє сигнали керування
для всіх блоків структурної схеми МП, а також керує обміном інформацією між МП,
пам'яттю і ПВВ. Пристрій керування реалізує такі функції:
1. Функція початкового
встановлення МП. Зовнішній сигнал початкового встановлення процесора RESET формується
при ввімкненні джерела живлення МП або при натисканні кнопки RESET. У
разі появи цього сигналу пристрій керування забезпечує завантаження нульового
значення у програмний лічильник, що
ініціює вибірку з пам'яті байта команди з нульовою адресою. Наприкінці вибірки
вміст лічильника команд збільшується на одиницю і вибирається байт команди з
наступною адресою. Таким чином виконується вся записана у пам'яті програма.
2. Функція синхронізації.
Згідно із зовнішніми сигналами керування і сигналами синхронізації пристрій
керування синхронізує роботу всіх блоків МП.
3.
Функція переривань. Із надходженням сигналу переривання пристрій керування
ініціює роботу підпрограми обробки відповідного переривання. Потреба у
реалізації функцій переривань виникає тоді, коли під час виконання основної
програми треба перевести МП на розв'язання іншої задачі, наприклад, обробки
аварійної ситуації або роботи з ПВВ.
4. Функція узгодження
швидкодії модулів мікропроцесорної системи. Під час обслуговування пам'яті та
ПВВ із значно меншою швидкодією, ніж МП, узгодження швидкодії вирішується
генерацією тактів очікування МП, а під час обслуговування пристроїв з більшою
швидкодією, ніж МП, використовується режим безпосереднього доступу до пам'яті.
Арифметико-логічний пристрій являє собою комбінаційну
схему на основі суматора, який сигналами з виходів пристрою керування налагоджується
на виконання певної арифметичної або логічної операції: додавання, віднімання,
І, АБО, НЕ, виключне АБО, зсув, порівняння, десяткова корекція. Отже, АЛП
виконує арифметичні або логічні операції над операндами, які пересилаються з
пам'яті і/або регістрів МП. Одержаний після виконання команди в АЛП результат
пересилається в регістр або комірку пам'яті.
Регістри призначені для зберігання n-розрядного двійкового числа. Вони являють собою п тригерів
зі схемами керування читанням/записом та вибірки. Регістри створюють внутрішню
пам'ять МП і використовуються для зберігання проміжних результатів обчислень.
Акумулятор – це регістр, у якому
зберігається один з операндів. Після виконання команди в акумуляторі замість
операнда розміщується результат операції.
Вказівник команду або програмний лічильник, призначений
для зберігання адреси комірки пам'яті, яка містить код наступної команди.
Програму дій МП записано в пам'яті у вигляді послідовності кодів команд. Для
переходу до наступної команди вміст лічильника збільшується на одиницю у
момент вибирання команди з пам'яті. Наприкінці виконання команди в лічильнику
команд зберігається адреса наступної команди.
Вказівник стека – це регістр, який зберігає
адресу останньої зайнятої комірки стека. Стеком або стековою пам'яттю
називається область пам'яті, організованої за принципом «останній прийшов –
перший пішов».
Регістр команд зберігає код
команди протягом усього часу виконання команди.
Регістр адреси і регістри
даних призначені для зберігання адрес і даних, які використовуються під час
виконання поточної команди у МП.
Регістр стану або регістр
прапорців (ознак) призначений для зберігання інформації про результат операції в АЛП і
являє собою декілька тригерів, які набувають одиничних або нульових значень.
2 Структура
та функціонування мікропроцесорної системи
На рисунку 2 наведена
структурна схема мікропроцесорної системи з МП, яка має шину адреси/даних, що
мультиплексується. Лінії A15-А8 є адресними, через них у систему передається
старший байт 16-розрядної адреси. У цю шину включений формувач (буферний
регістр ИР82) з постійно відкритим входом дозволу EN, що забезпечує роботу шини
на навантаження. Власної навантажувальної здатності у виводів МП, як правило,
недостатньо. Лінії AD7-0
мультиплексуються. Спочатку вони передають молодший байт адреси, ознакою чого
служить наявність сигналу ALE (Address Latch Enable), що завантажує цей байт у
регістр ИР82.
Після завантаження регістра
сигнал ALE знімається, і вміст регістра залишається незмінним аж до нового
завантаження в наступному циклі роботи процесора. Так формується 16-розрядна
шина адреси, що містить адресу A15-0. Ця адреса використовується блоками
постійної (ROM) й оперативної пам'яті
(RAM). Адресація портів введення і виведення даних вимагає восьми
розрядної адреси, що надає можливість працювати
не більш ніж з 256 портами кожного з типів. Адресу портів можна знімати
з будь-якої половини адресної шини.
Після передачі молодшого
байта адреси шина AD7-0 віддається для передачі даних. Напрямок передачі
задається буфером даних BD у залежності від сигналу Т (Transіt). При активному стані сигналу читання
RD (Read) дані передаються до мікропроцесора, при пасивному – у зворотному
напрямку. До шини даних підключені інформаційні виводи всіх модулів МПС.
Рисунок 2 –
Структура мікропроцесорної системи.
3 Архітектура мікропроцесора i8085
Архітектура мікропроцесора i8085 (К1821ВМ85А) наведена на рисунку
3. Мікропроцесор має восьми розрядну шину даних (внутрішню), через яку його
блоки обмінюються інформацією.
На схемі прийняті такі позначення:
- AC (Accumulator) – регістр-акумулятор,
виконаний на двоступінчастих тригерах і здатний зберігати одночасно два слова
(один з операндів і результат операції);
- TR (Temporary Register) – регістр тимчасового
зберігання одного з операндів;
- ALU (Arithmetic-Logic Unit) – арифметико-логічний пристрій, що виконує дії
над двома словами - операндами, які подаються на його входи. Акумулятор служить джерелом і приймачем даних, TR
- джерелом слова даних, збереженим на час виконання операції. АЛП функціонує відповідно до співвідношення А: =
А* В, де В зберігається в TR, другий операнд надходить від акумулятора, у нього
ж надходить результат операції. АЛП
безпосередньо виконує лише операції додавання, віднімання, зсуву, порівняння
слів, порозрядні логічні операції (кон’юнкцію, диз'юнкцію, додавання по модулю
2). Більше складні операції
(множення, ділення і ін.) виконуються у підпрограмах. У АЛП є схема переводу двійкових чисел у
двійково-десяткові (DA, Decimal Adjust);
- RF (Register Flags) – регістр
прапорців вказує ознаки результатів арифметичних або логічних операцій,
виконаних у АЛП.
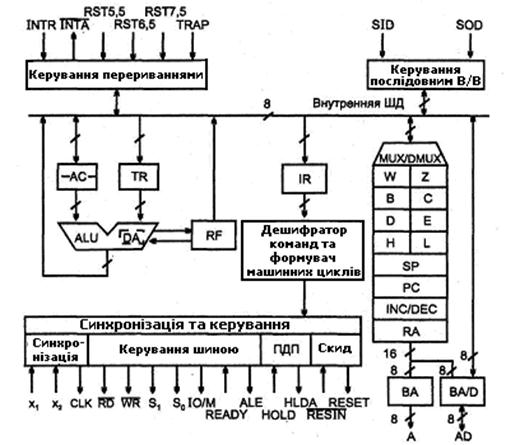
Рисунок 3 – Архітектура мікропроцесора К1821ВМ85А
Існує п'ять ознак: Z (Zero) - нульовий результат, С
(Carry) - перенос, AC (Auxiliary Carry) - допоміжний перенос, S (Sign) - знак,
Р (Parity) - парність ваги слова. Ознака допоміжного переносу (переносу між молодшою
й старшою тетрадами восьми розрядного слова) потрібна при виконанні операцій у
двійково-десятковому коді. Ознаки служать для керування ходом процесу обробки
інформації.
Блок регістрів
Із внутрішньою шиною даних через мультиплексор
зв'язаний блок регістрів, частина яких спеціалізована, інша частина – регістри
загального призначення (РЗП) програмно доступні й можуть бути використана за
розсудом програміста. Регістри позначені через W,
Z, В, С, D, E, H, L, SP і PC. Регістри W і Z призначені тільки для тимчасового
зберігання даних під час вибірки команди з пам'яті й недоступні для
програміста.
Регістри В, С, D, Е, Н, L відносяться до регістрів загального призначення Ці
восьми розрядні регістри можуть застосовуватися або окремо, або у вигляді пар
ВС, DE, HL, що грають роль 16-розрядних регістрів. Пари регістрів мають назви В,
D, Н. Пара H, як правило, використається для розміщення в ній адрес при
непрямій регістровій адресації. У блоці регістрів є також 16-розрядні регістри SP
і PC. Регістр SP (Stack Pointer) – покажчик стека. Порядок уведення слів у стек і
їхнього зчитування визначені його пристроєм. При організації типу LIFO
(Last In - First Out) останнє записане в стек слово при зчитуванні з'являється
першим.
Операції зі стеком - PUSH
(запис слова) і POP (зчитування слова).
Апаратно стек реалізується у ОЗП, де для нього
виділяється певна область. Покажчик стека SP містить адресу останнього
зайнятого осередку. При виконанні операцій Push і Pop значення SP зменшується або
збільшується.
Програмний лічильник PC (Program Counter) дає
адресу команди, і може звертатися в кожний з 64К осередків АП. При скиданні МП PC приймає
нульовий стан, що, таким чином, є адресою першої команди, що виконується. Довжина команди становить
1...3 байта. Уміст програмного лічильника після вибірки чергового байта з
пам'яті автоматично інкрементується, так що в PC з'являється адреса наступної
команди, якщо поточна команда була однобайтовою, або наступного байта поточної
команди в противному випадку. Другий і третій байти команди надходять у регістри
W і Z, які не адресуються програмою й використаються тільки блоком внутрішнього
керування.
Схема INC/DEC (Increment/Decrement) змінює передані через неї слова на +1 або
-1.
Регістр команд IR (Instruction Register) приймає з
пам'яті перший байт команди, що після декодування створює сигнали, необхідні
для реалізації машинних циклів, запропонованих кодом операції.
Блок синхронізації й керування використає вихід дешифратора
команд і шифратора машинних циклів для синхронізації циклів, генерації сигналів
стану й керування шиною (зовнішніми пристроями мікропроцесорної системи).
При обміні між МП і пам'яттю або ЗП адреса
відповідної комірки пам'яті або ЗП від обраної команди або однієї з регістрових
пар передається у регістр адреси RA.
Буфер адреси ВА із трьома станами виходу видає
сигнали старших розрядів адреси на лінії адресної шини А15-8.
Буфер
шини адрес/даних BA/D із трьома станами виходу передає на шину A/D з поділом у
часі молодший байт адреси або байт даних.
МП, почавши роботу, вибирає з пам'яті й виконує одну команду за
іншою, поки не дійде до команди "Зупинка" (HLT). Мікропроцесор К1821 має такі
типи машинних циклів:
1. Вибірка команди (OF, Opcode
Fetch).
2. Читання з пам'яті (MR, Memory
Read).
3. Запис до пам'яті (MW, Memory
Write).
4. Читання з ЗП (IOR, Input-Output
Read).
5. Запису у ЗП (IOW, Input-Output
Write).
6. Підтвердження переривання (INA,
Interrupt Acknowledge).
7. Звільнення шин (BI, Bus Idle).
8. Зупинка (HALT).
На початку кожного машинного циклу генеруються
сигнали стану, які ідентифікують тип циклу й діють протягом усього циклу.
Функції виводів і сигналів:
- A15-8 – вихідні
лінії із трьома станами для видачі старшого байта адреси пам'яті або повної
адреси ЗП.
Переходять у третій стан у режимах HOLD, HALT і RESET;
- AD7-0 – двохнаправлені
мультиплексовані лінії із трьома станами для видачі молодшого байта адреси пам'яті або
повної адреси ЗП
в першому такті машинного циклу, після чого використовуються як шина даних;
- ALE – строб дозволу
завантаження молодшого байта адреси пам'яті в зовнішній регістр для його
зберігання протягом машинного циклу. З'являється у першому такті машинного циклу. Регістр завантажується спадом
сигналу ALE;
- ![]() ,
, ![]() –
строби читання або запису. Низький рівень відповідного сигналу інформує про те,
що адресована комірка пам'яті або зовнішній пристрій повинні виконати операцію
читання або запису. Виводи
переходять у третій стан у режимах HOLD, HALT і RESET;
–
строби читання або запису. Низький рівень відповідного сигналу інформує про те,
що адресована комірка пам'яті або зовнішній пристрій повинні виконати операцію
читання або запису. Виводи
переходять у третій стан у режимах HOLD, HALT і RESET;
- READY – вхідний сигнал, який
показує, що пам'ять або ЗП готові до обміну із МП. Якщо готовності пам'яті або ЗП
немає, МП входить у стан очікування, що може тривати будь-яке число тактів аж
до появи одиничного рівня сигналу READY;
- S1, S0 – сигнали стану МП, які
повідомляються зовнішньому середовищу. Формуються на початку й зберігаються під
час усього машинного циклу;
- IO/М – сигнал вибору пам'яті
або зовнішнього пристрою. При високому рівні відбувається звертання до ЗП, при
низькому – до пам'яті.
Разом із сигналами S1S0 сигнал IO/М ідентифікує тип
машинного
циклу. Сигнали стану й керуючі сигнали ![]() ,
, ![]() і
і ![]() для
різних машинних циклів мають наступні значення:
для
різних машинних циклів мають наступні значення:
Таблиця 1 – Сигнали стану та керування для різних машинних циклів
|
Тип МЦ |
Сигнали стану |
Сигнали керування |
||||
|
IO/М |
S1 |
S0 |
|
|
|
|
|
OF |
0 |
1 |
1 |
0 |
1 |
1 |
|
MR |
0 |
1 |
0 |
0 |
1 |
1 |
|
MW |
0 |
0 |
1 |
1 |
0 |
1 |
|
IOR |
1 |
1 |
0 |
0 |
1 |
1 |
|
IOW |
1 |
0 |
1 |
1 |
0 |
1 |
|
INA |
1 |
1 |
1 |
1 |
1 |
0 |
|
BI |
Z |
X |
X |
1 |
1 |
1 |
|
HALT |
Z |
0 |
0 |
Z |
Z |
1 |
·
X1, X2 – ці виводи призначені
для підключення кварцового резонатора або інших кіл, для забезпечення роботи
внутрішнього генератора синхроімпульсів МП. Частота на виводах у 2 рази
вище робочої частоти;
·
![]() (
(![]() ) –
вхід сигналу скидання МП у початковий стан. Сигнал може надійти у
будь-який час за командою оператора. Автоматично формується з подачею живлення. Під його впливом скидаються
регістри PC і IR, тригери дозволу переривання, підтвердження захоплення;
) –
вхід сигналу скидання МП у початковий стан. Сигнал може надійти у
будь-який час за командою оператора. Автоматично формується з подачею живлення. Під його впливом скидаються
регістри PC і IR, тригери дозволу переривання, підтвердження захоплення;
·
CLK – вихід синхроімпульсів для мікропроцесорної
системи. Частота цих імпульсів у два рази нижче частоти на виводах X1
і X2.
·
RESET – вихідний сигнал скидання для зовнішніх
модулів системи, прив'язаний до тактових імпульсів CLK (відрізняється від
сигналу RESIN по фазі);
·
INTR (Interrupt Request) – вхід запиту векторного
переривання, що викликає генерацію строба ![]() , якщо переривання дозволене
програмою. Адреса
підпрограми, що викликається цим входом, видається зовнішнім пристроєм. При скиданні прийом сигналу забороняються
(переривання заборонені);
, якщо переривання дозволене
програмою. Адреса
підпрограми, що викликається цим входом, видається зовнішнім пристроєм. При скиданні прийом сигналу забороняються
(переривання заборонені);
·
![]() (Interrupt
Acknowledge) – вихід строба підтвердження векторного переривання після
завершення поточного командного циклу.
Використовується для читання вектора переривання;
(Interrupt
Acknowledge) – вихід строба підтвердження векторного переривання після
завершення поточного командного циклу.
Використовується для читання вектора переривання;
·
RST 5,5; RST 6,5; RST 7,5 – входи запитів
радіального переривання типу RSTn (n = 5,5; 6,5; 7,5). Пріоритети фіксовані, вищий
пріоритет у входу RST 7,5. Пріоритети всієї групи запитів вище пріоритету
запиту INTR;
·
TRAP – вхід запиту переривання, що не маскується та
має максимальний пріоритет;
·
SID, SOD (Serial Input Data, Serial Output Data) –
вхід і вихід послідовної передачі даних;
·
HOLD
– сигнал запиту захоплення шин. Формується зовнішнім пристроєм;
·
HLDA – сигнал підтвердження захоплення (Hold Acknowledge).
Є відповіддю на сигнал HOLD, який формується наприкінці поточного машинного
циклу. Інформує о відключенні МП від системних шин. При цьому
шини й лінії керуючих сигналів ![]() ,
, ![]() , IO/М , ALE переводяться у третій
стан.
, IO/М , ALE переводяться у третій
стан.